






サムネールをクリックすると大きい画像が見られます
|
|
|
|
|
|
|
|---|---|---|---|---|---|---|
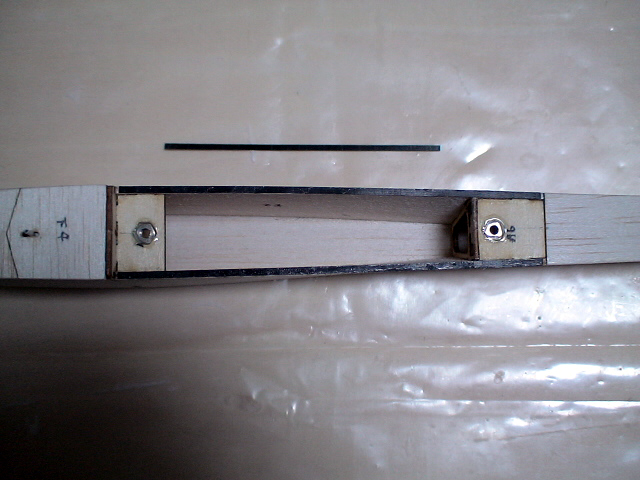
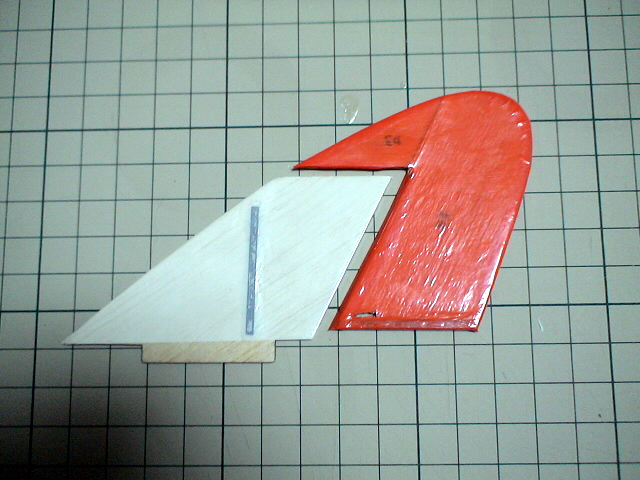
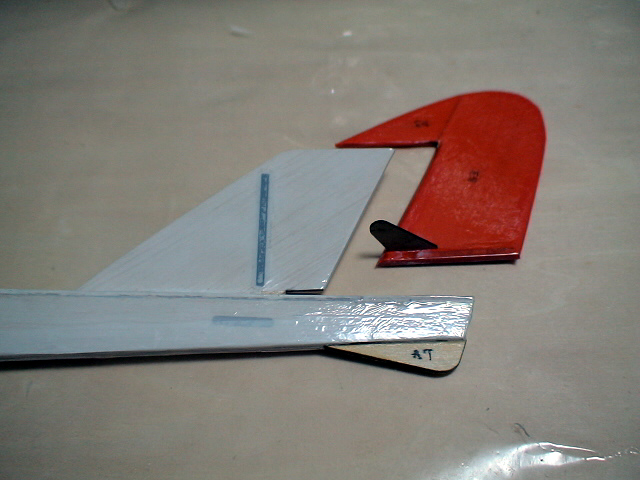
| 主翼完成 | 主翼の固定は、3mmネジ止め形式にする。ナット埋め込み(エポキシ接着剤使用) | 持ち運びに便利になるので、水平尾翼固定も2mmネジ止め形式にする。ナット埋め込み(エポキシ接着剤使用) | ネジ止め部分のベニヤ接着 | 水平尾翼は、カーボンリブキャップ補強にする | ラダー下側も、カーボンリブキャップ補強にする | 垂直尾翼も、カーボンリブキャップ補強にする |
 |
 |
 |
 |
 |
 |
|---|---|---|---|---|---|
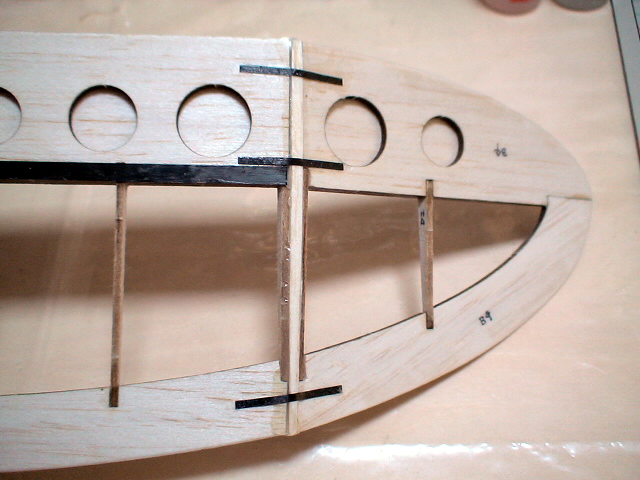
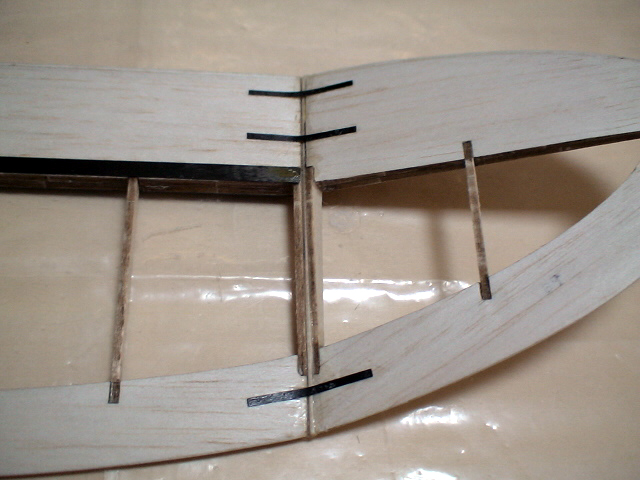
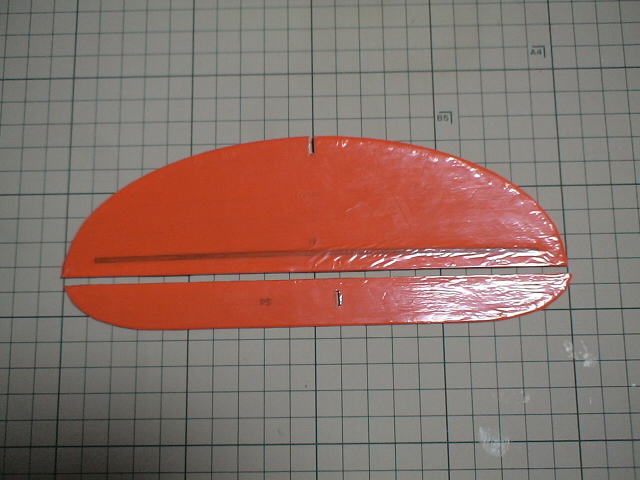
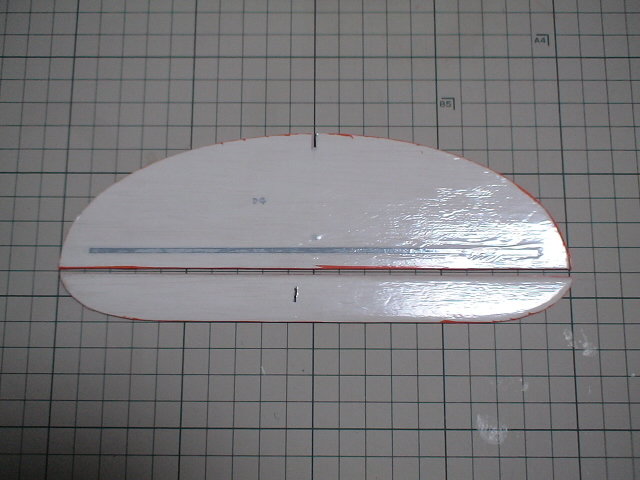
| 生地完成→ | ← | 胴体部分の主翼が止まる位置左右は、カーボンリブキャップ補強にする | 主翼カーボンスーパー補強にする(上下)→ | ← |
 |
 |
 |
 |
 |
 |
|---|---|---|---|---|---|
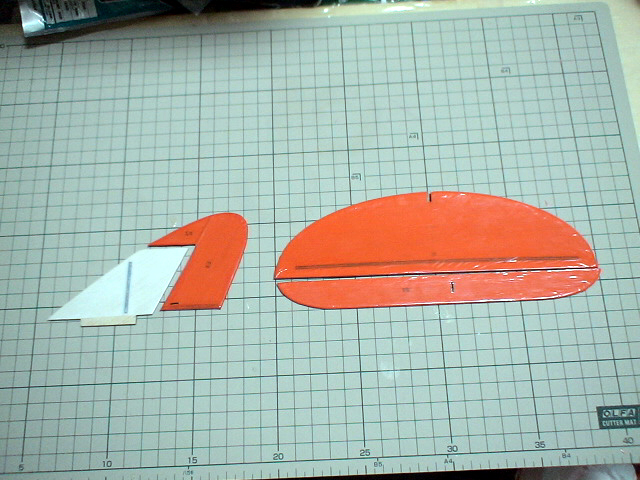
| 外翼もカーボンリブキャップ補強にする(上下)→ | ← | フイルム貼り(イージーカバE−ライトフイルム使用)→ |
 |
 |
 |
 |
 |
 |
|---|---|---|---|---|---|
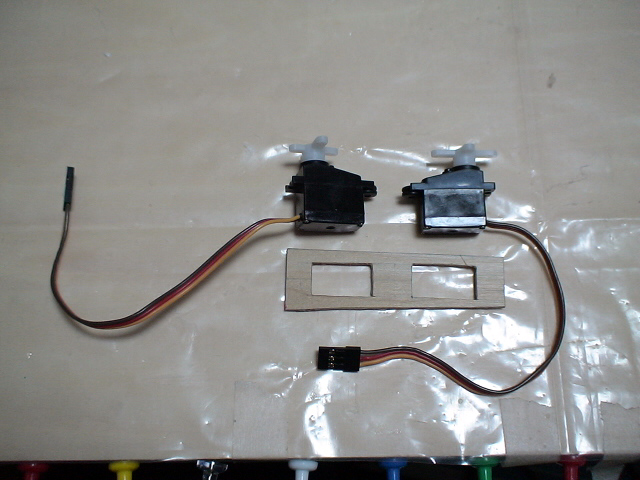
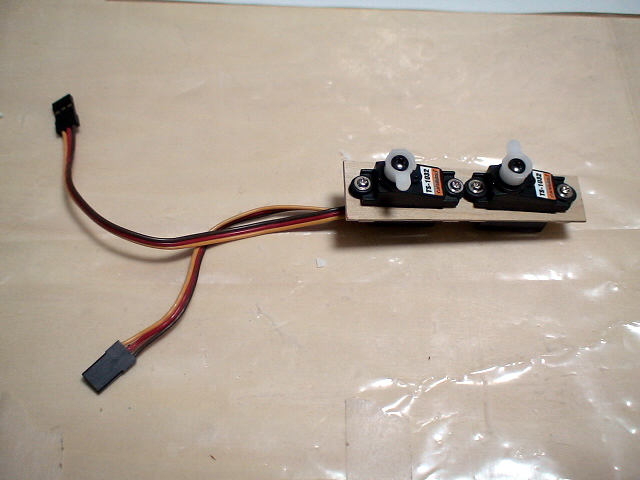
| ← | サーボマウント方式にする。サーボマウントを航空ベニヤにて作成→ | サーボ取り付け← |
 |
 |
 |
 |
 |
 |
|---|---|---|---|---|---|
| サーボマウント接着(セメダインスーパーX2接着剤使用)サーボ取り付け | 水平尾翼のヒンジテープ貼り→ | 垂直尾翼のヒンジテープ貼り← |
 |
 |
 |
 |
 |
 |
|---|---|---|---|---|---|
|
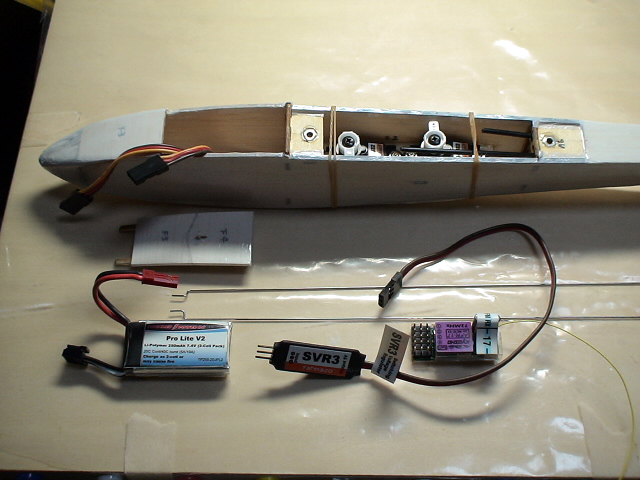
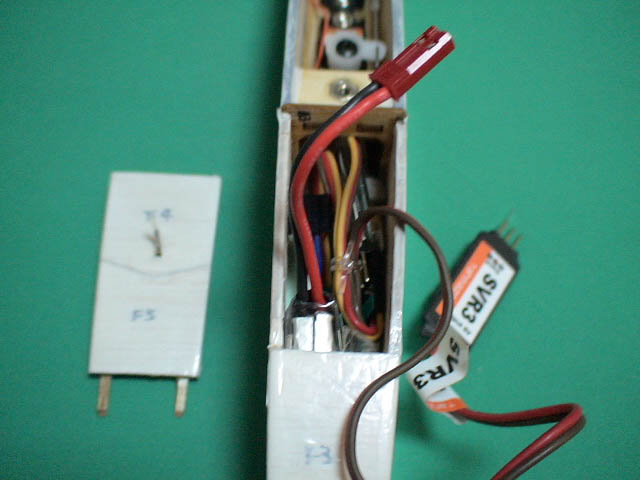
リンケージ(エレベーター・ラダーとも) |
← | 受信機:KYOSHO AFR−17(以前、EPR−21使用のもの72MHZ)バッテリー・レギュレーター仮組み込み | アンテナ線の引き出し(ノイズレスパイプをガイドにしました)→ | ← |
 |
 |
 ロゴも入れました2010/03/20 ロゴも入れました2010/03/20 |
|---|---|---|
|
全備重量 108gで完成 2010/03/14 重心合わせは、前縁より、30mm(マニュアル30〜35mm)の位置の主翼中心にテグスの通る穴を開けて 手グスで吊るして左右前後含めて重心を合わす方式にする。 重心について オモリを入れて全備重量 134g→ |
陀角とプロポ設定(SANWA RD−6000 Super)
エレベーター 上下 5mm (ELEV D 60 U 60) ラダー 左右 15mm (RUDD L 110 R 110) |
 Craft ROBOにて作成(カッティングフイルム)← |
 |
 |
|---|---|
| いつもの通り、持ち運び時の機体保護の為、梱包用シート(エアー入り)で、機体を、それぞれ入れる袋を作成しました2010/03/20→ | miniASK21の箱に収まり兼用出来ます。いつもの通り、遠征時、スノーボードケースに入れます← |
| アマチュア無線の恒例春移動にて、野田市関宿にてテストフライト。少し風も強かったので、高度を上げずに重心確認のみOK 2010/04/04 |
|---|
| 地元の河川敷にてフライト。小さいせいか結構、安定感が、悪い?。操縦が難しい。また、あまり高度上げられなかった。時々、サーボが、ガチャつく事を発見。電波の距離テストをしたら、あまり離れない内にガチャつく。受信機が、おかしいのか?。受信機作動範囲約300mのはずが...。受信機を変更検討。
コロナ 4CHシンセサイザー受信機RP4S1(72MHz)到達距離:最大約1500mをインターネットにて購入の為、注文する。値段も安いです 2010/04/25 |
|---|
 |
 |
 |
|---|---|---|
| コロナ RP4S1 | SCAN SWで、簡単にCHが合いました。この受信機の方が余裕で入りました 2010/04/29 |
【2.4GHZ化】
 |
|---|
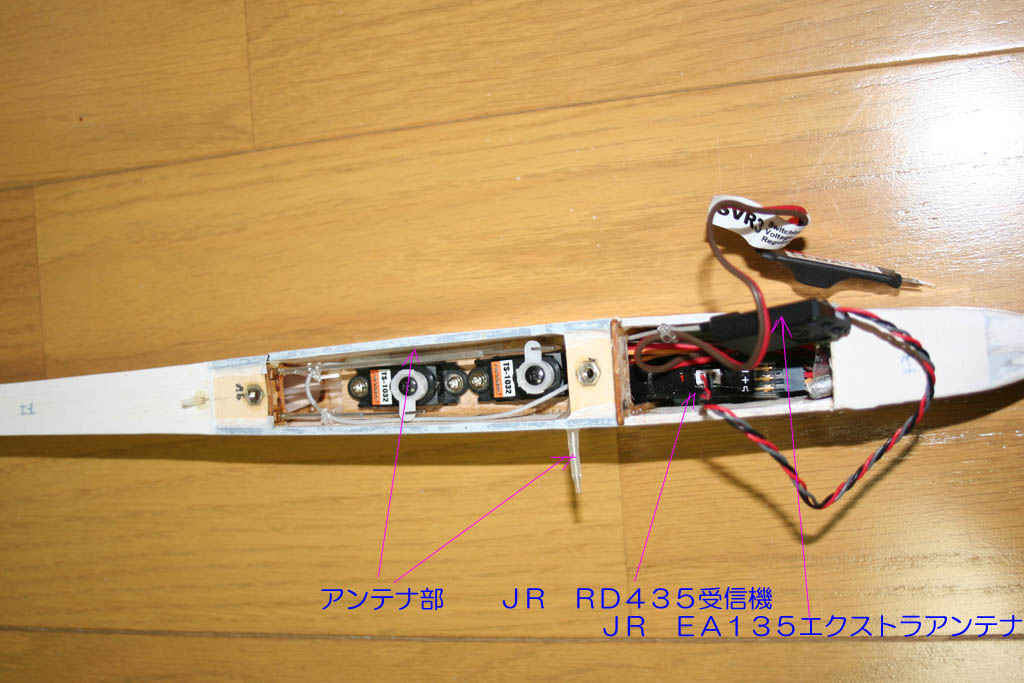
| 同軸タイプのJR RD435受信機とエクストラアンテナも同軸タイプのEA135で組み込みました 2010/10/30 |
【舵角確認再調整】2016/11/17
しばらくフライトしていないので、舵角その他、再確認調整する
【自作舵角ゲージについて】2016/11/17
舵角再確認および調整について参考
http://e-tsuru.sakura.ne.jp/rc_gladiator2/gladiator2_3.htmへのリンク
| 戻る |